
华为“上车”激光雷达,有什么黑科技?
本文来自汽车人参考。
历经四年多研发,华为发布了96线车规级激光雷达,同日,北汽旗下ARCFOX谍照曝光,成为首个搭载华为激光雷达的电动车。媒体竞相报道,赞美之情溢于言表,华为激光雷达究竟有什么黑科技?
华为与激光雷达有关的发明专利共42个,其中大部分处于审查阶段,汽车人参考选取了其中最核心的7个专利,按照痛点(Why)、解决方案(How)、取得效果(What)思路,让读者对其核心技术有一个了解。
核心技术一:发射
专利1:一种地面环境的检测方法和装置(CN110114692A -审查中)
痛点:激光雷达对复杂的地面环境感知差。
解决方案:利用不同工作波长的激光扫描地面,依据不同波长激光下的反射强度判断地面环境类型。
取得效果:提高了激光雷达对复杂地面环境的感知效果,更好地确定可通行路面。
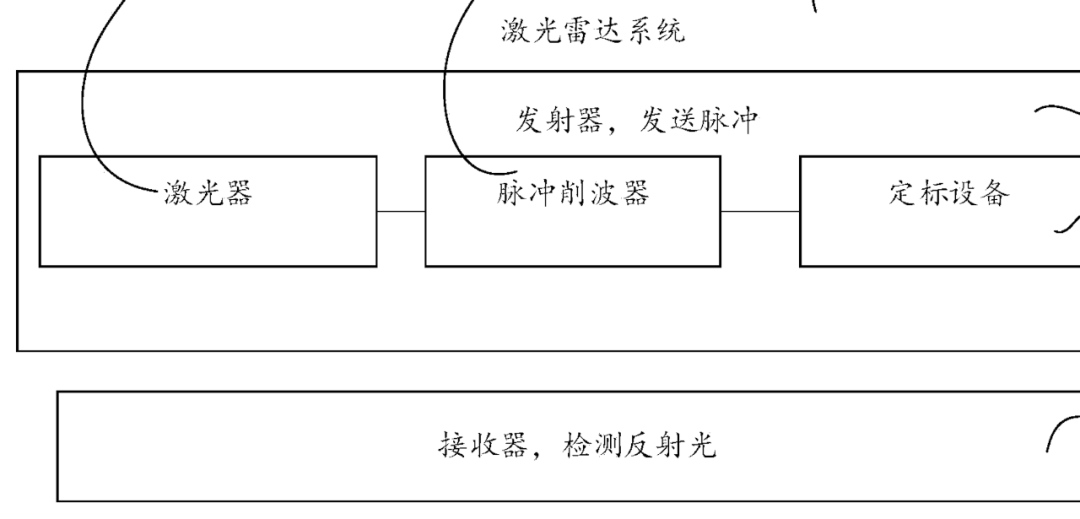
专利2:用于激光雷达的光脉冲削波器(CN110431440A-审查中)
痛点:激光器的脉冲功率过高,会对人眼造成伤害,但功率过低又无法满足探测距离、分辨率等要求。
解决方案:在激光发射器上搭载脉冲削波器,产生快门效应,能降低瞬时输出功率。
取得效果:既能满足人眼安全限制,又能达到距离和分辨率要求,同时方案比较廉价。
专利3:多线激光雷达(CN108061904A -审查中)
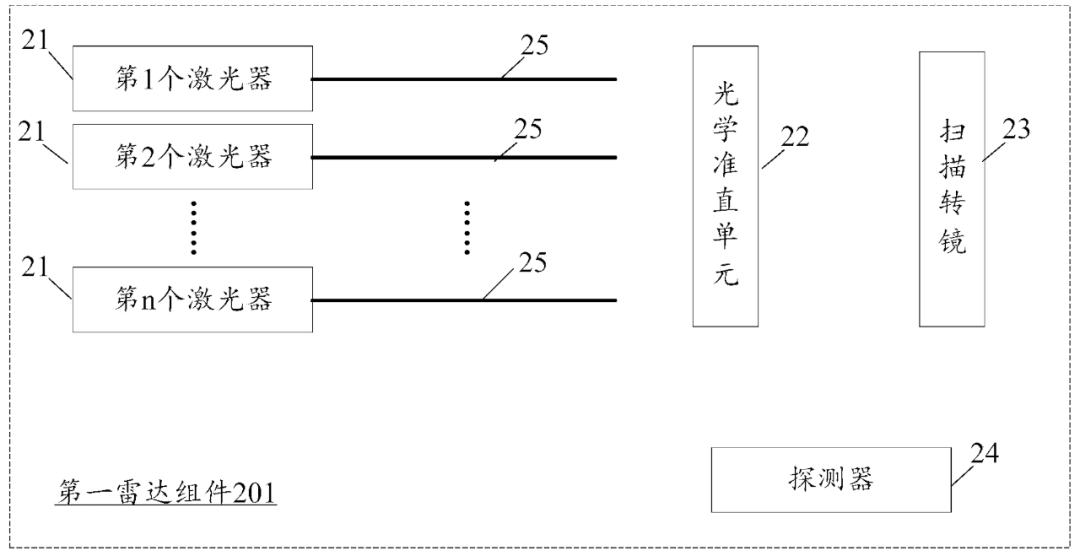
专利4: 光扫描组件及激光雷达(CN111830531A-审查中)
痛点:前视型激光雷达采用“一发射多接收”结构,探测器需要在高频率、高电压下工作,数量太多,信号串扰严重,激光雷达工作性能不稳定。
解决方案:采用“多发射一接收”结构,仅设置一个探测器,扫描转镜中包含多个反射镜,可对同一激光束有不同反射角度,一个激光器实现多线扫描。
取得效果:激光雷达工作性能稳定,成本价更低。
核心技术二:扫描
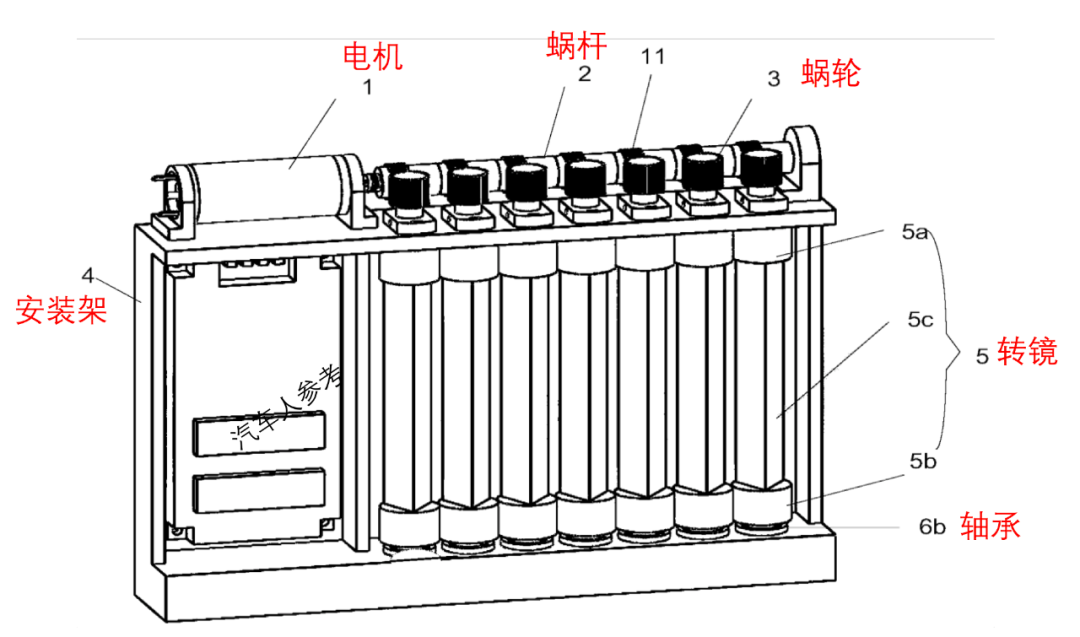
专利5:一种阵列转镜的光束扫描装置(CN108227181B -已授权)
痛点:
1. 光学相控阵激光雷达(固态):接收模块需要使用APD探测器阵列,成本很高;光子集成工艺技术和相控阵控制算法要求高,仍处于实验室阶段。
2. MEMS微振镜激光雷达(半固态):扫描角比较小,只有6°范围内能保持较高精度线性运动;微振镜只有1至3mm,尺寸小,需要配合复杂光学系统。
解决方案:将扫描镜分解成多个子转镜,并配合电机、蜗杆、涡轮、轴承等一系列机构。
取得效果:提高了扫描角度,兼顾了扫描速度,结构简单、低成本、小型化的激光雷达。
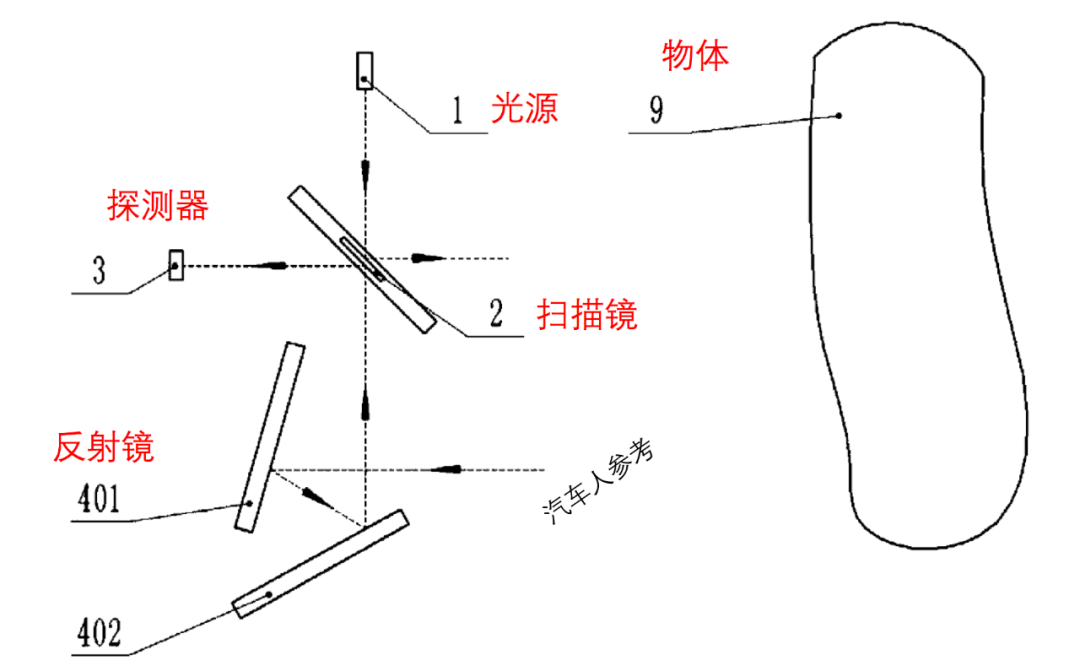
专利6: 激光雷达(CN111308442A -审查中)
痛点:激光雷达扫描镜只有一个反射面,发射的激光束和反射的激光束容易串扰。
解决方案:扫描镜拥有发射和接收两个反射面,可以平行,也可以呈一个角度。
取得效果:发射的激光束和反射的激光束实现完全分离。
核心技术三:探测
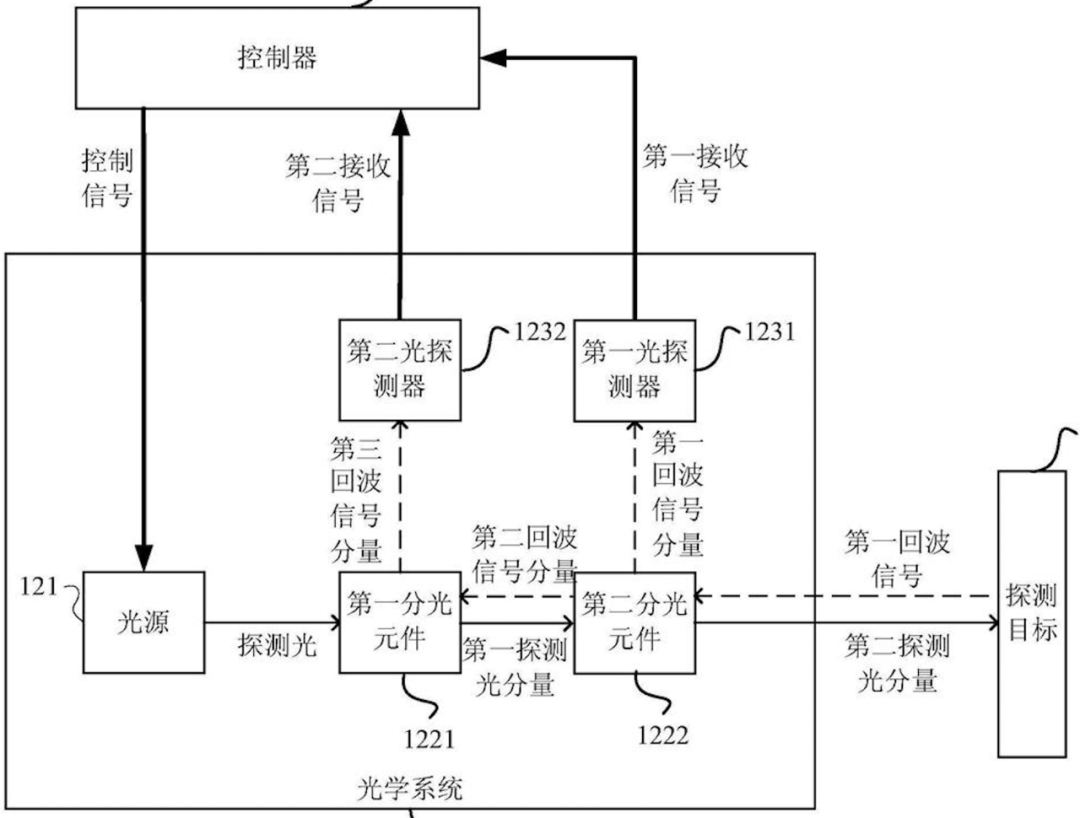
专利7:一种光探测系统及方法(CN111929700A -审查中)
痛点:同轴型激光雷达,探测光和回波信号是同光路设计,经过同一分光元件,透射率或反射率是固定的,难以同时降低探测光损耗(降低反射比)和降低回波信号损耗(提高反射比)。
解决方案:采用两个分光元件(其中一个偏振型)和两个光探测器。
取得效果:同时实现探测光的损耗和回波信号的损耗最小化,并提高探测精确度。
小结
从以上专利分析来看,华为激光雷达技术路线选择的是半固态的MEMS微振镜技术路线,其核心技术重点在发射、扫描、探测三个层面。
考虑到激光雷达竞争激烈、技术门槛高,核心技术国内外玩家早已在专利上进行了布局,要想在这些领域有突破其实很难。从这个角度上来讲,华为的激光雷达不需要被捧上天,但还是有自己的东西,确实有点香。


 扫码下载智通APP
扫码下载智通APP